NEWS
震災救助用ロボット、人工知能の目で救助及び震災対応に革新的な寄与!
2021-09-14 hit . 60307

左側からGISTのH.G.JEON教授、DGISTのS.H.LIM教授、KAISTのI.S.KWON教授
アルゴリズムの概要
2021.09.14 12:53
地震、火事、台風などのような大形震災がグローバル的に急増している中、
危ない震災現場において素早くて安全な人命救助は何よりも重要だと言える。
震災現場を模写した大規模のデータセットを構築し、現場から被害者の位置を推定できるアルゴリズムに関した研究結果が最近発表された。
GIST(光州科学技術院)の人工知能(AI)大学院のH.G.JEON(ジョン・ヘゴン)教授とDGISTのS.H.LIM(イム・スンフン)教授、
KAISTのI.S.KWON(クォン・インソ)教授、米国カーネギーメロン大学校などで構成された共同研究チームは
震災救助用ロボットの視覚認知に向いた人工知能アルゴリズムを開発した。
大震災の対応に関した社会的ニーズにも関わらず、
震災救助関連の研究は産業的ニーズの不足により活発な研究までには至らなかったのが現状。
特にも人工知能技術の発展は震災救助業務に画期的なパラダイムを提示してくれると見えたが、
関連研究のために必要なデータセットの不足や開発されたアルゴリズムを検証するプロトコルの不在が問題になっている。
また、震災現場に関するデータセットの収集は難しく、収集したとしても人工知能のアルゴリズム学習に必要な量までは至らない。
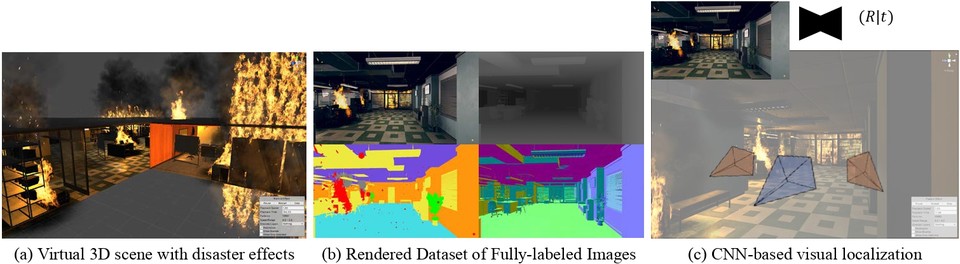
研究チームは仮想現実空間での震災現場を模写した大規模のデータセットを構築し、室内外の仮想環境においての地震と火事現場を演出した。
震災前後の状況を同じ空間や時点で正確に比べられるように動画を収集し、
3次元情報とカメラ位置情報及び意味論的動画分割情報をアノテーションした。
これとともに、震災前状況から学習された空間情報を基に震災状況において被害者の位置を
単一動画だけでも推論できるアルゴリズムも開発した。
H.G.JEON教授は、
「本研究は仮想現実において震災状況を人工知能を用いて作られたシミュレーションを通じて
素早く対応できる震災救助用ロボットの視覚認知に向いた人工知能アルゴリズムを提案した」とし、
「本研究が今後、様々な震災救助研究に繋がるきっかけになってほしい」と述べた。
一方、今回の研究は韓国産業通商資源部の
震災現場救助及び人道的支援のためのロボット基盤技術韓・米共同研究事業の支援のを受けて遂行され、
IEEEパターン分析及びマシン知能(Transactions on Pattem Analysis and Machine Intelligence)に
「震災対応のための大規模仮想データセット及び自律的位置推定」というタイトルで今年の7月に掲載された。
※本件についてお問い合わせ事項がございましら、当ホームページの「お申込み/お問い合わせ」又は下記の連絡先へご連絡お願い致します。
部署名:SEOIL E&M 企画マーケティンググループ
TEL :+82)2-6204-2033
E-mail : pl@seoilenm.com